20本脚のウニ型ロボットがロボット工学の常識を覆す
理想のロボットを数学で設計したら、ウニ似になった。20本の脚が球体から放射状に伸びたロボットが、壁を登り、砂地も密林も向きを問わず突き進む。
鍵を握るのは、”あらゆる方向に均等に力を出せる”数学的な性質だ。
アメリカ・デューク大学の研究チームが1500回以上のシミュレーションを重ねて生み出したロボット「アルゴス」は、人間や犬を模してきたロボット工学の常識を根本からくつがえすことになりそうだ。
この研究は「Science Robotics」(2026年5月27日付)に掲載された。
ロボット工学の世界では長い間、お手本は自然界の動物だった。
ボストンダイナミクス社のヒューマノイド(人型)ロボット「アトラス」や、犬に似た四足歩行ロボット「Spot(スポット)」、他にも昆虫の構造を参考にした小型ロボットなど、多くが左右対称の動物の形を起点に設計されてきた。
この画像を大きなサイズで見るImage credit:Duke Universityデューク大学の総合ロボティクス研究室はまずその前提を疑うことから始めた。
「どの動物に似せるか」という問いを捨て、「数学的にあらゆる方向へ最も均等に動ける”形”とは何か」を考えたのだ。
チームは1500回以上の異なるロボット形状のシミュレーションを重ね、一つの答えにたどり着いた。
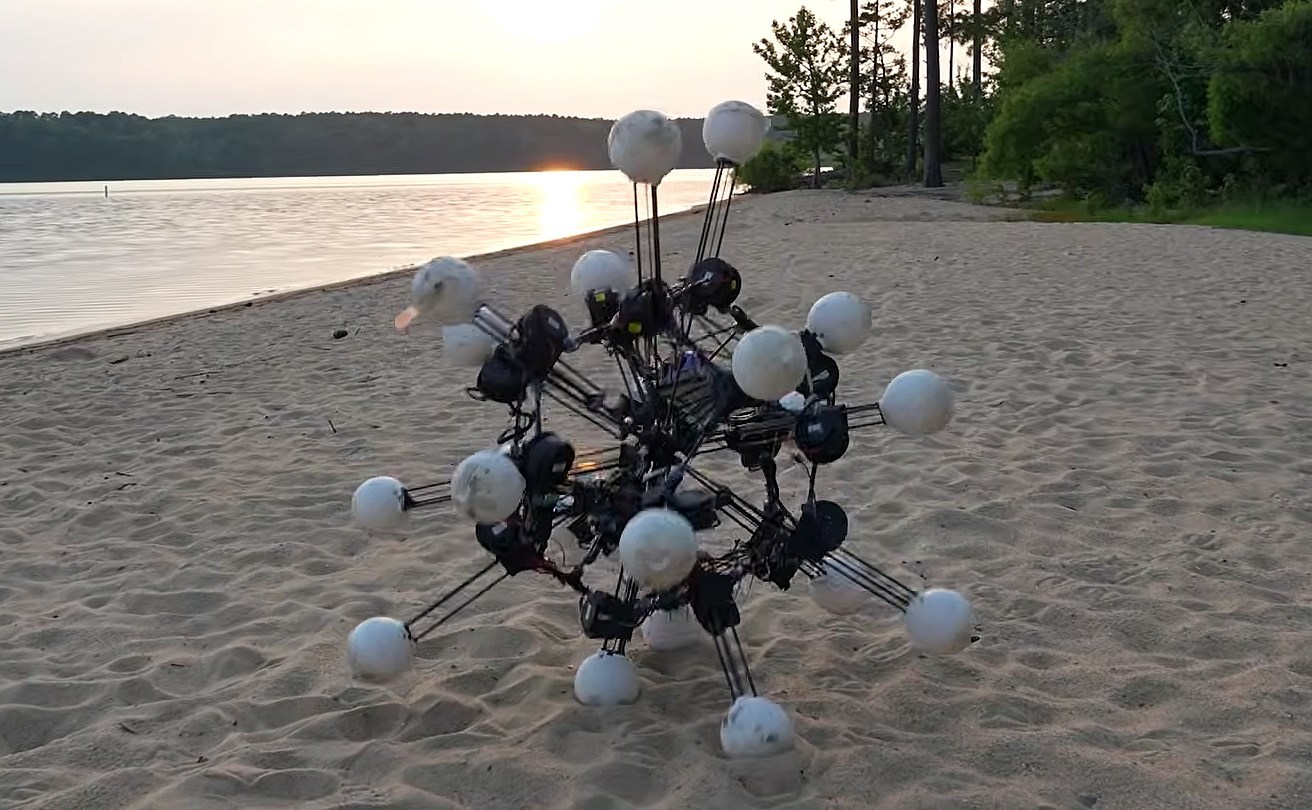
それが前も後ろも頭もない、見ためウニのような20本脚のロボット、その名も「アルゴス(Argus)」だ。
この名前は、ギリシャ神話に登場する「全身に無数の目を持つ巨人の番人」にちなんだもの。各脚の先端にカメラを備えたアルゴスの全方向の視野をその怪物になぞらえたという。
この画像を大きなサイズで見るImage credit:Duke Universityチームが設計の指標に据えたのは「動的等方性(dynamic isotropy)」と呼ばれる数学的な概念だ。
この画像を大きなサイズで見るImage credit:Duke Universityそれはロボットが、”あらゆる方向に対して重心をどれだけ均等に加速できるか”を、0から1のスコアで表すというもの。
スコアが1に近いほど、前後左右上下のどの方向にも同じように力を発揮できることを意味する。
現在の最先端ロボットのほとんどは、このスコアが0.6を下回る。
高度な四足歩行ロボット、ヒューマノイド、一般的なドローンも例外ではなく、どうしても得意な方向と不得意な方向が存在する。
この画像を大きなサイズで見るimage credit:youtube一方、アルゴスはこのスコアで0.91を達成し、理論上の最大値に肉薄した。
この画像を大きなサイズで見るimage credit:youtube研究室を率いるボーユアン・チェン博士はこう説明する。
この画像を大きなサイズで見るImage credit:Duke Universityロボットがあらゆる方向に均等に加速できれば、特定の方向に向かって構える必要がなくなります。
前と後ろが同じになり、左と右も同じになる。ロボット制御という問題全体の性質が変わるのです
0.91という高スコアの鍵は、「正十二面体」の立体形状だ。
12枚の正五角形で成るこの立体のどこから見ても均等な形状に基づき、20本の脚を放射状に配置した。
この画像を大きなサイズで見るImage credit:Duke Universityそれぞれの脚は望遠鏡のように伸縮する構造で、1本あたり約4万5000円(300ドル)となかなか高価だ。
さらに各脚の先端には1個ずつ深度カメラ(距離情報も同時に取得できるカメラ)が取り付けられていて、20個の”目”全体でほぼ360度の視野をカバーする。
この画像を大きなサイズで見るImage credit:Duke Universityアルゴスの構造は、自然界の生き物と意外な共通点を持つ。
たとえば複眼で全方向を同時に捉える昆虫や、頭部を持たず体全体で動きを感知するウニなどがあてはまる。
どちらも単一の視点や方向に依存せず、分散した感覚器(センサー)と動力の協調によって動作する。
この画像を大きなサイズで見るImage credit:Duke University数学から純粋に導き出した設計が、はからずもウニのような放射相称(中心から放射状に広がる左右対称ではない対称性)の無脊椎動物、という自然界の形に近づいたのは興味深い。
博士課程の学生で共著者のジアシュン・リウ氏はこう振り返る。
アルガスの動きは、過去私たちが扱ってきたどのロボットとも全く違います。
アルゴスが木々の間や荒れた地形をナビゲートし、強い衝突にも耐えるところを初めて見たとき、「今までとは違う何かだ」と確信しました
関連記事:

なぜヒトの声には個性があるのか? 喉から消えた「膜」の正体

なにに見える? “とも座”で赤く輝くHII領域「Gum 10」と「Gum 11」

深海の幽霊「ゴブリンシャーク」を野生下で初撮影に成功 (2/2)
